
AP2S (Autonomous Plastic Sorting Station) is a proof-of-concept prototype machine/robot (that fortunately cannot take over the world ... yet) that sorts plastic items based on it's type (See Wikipedia) by using RFID tags embedded in the items. The idea is that all the plastic items will have a RFID tag embedded in it during manufacturing.
The project was used as an entry for the Smart Young Mindz high school challenge (Unfortunately we did not win).
The robot is controlled using an Arduino Uno. The arm is rotated using a 3.0 Nm stepper motor and a 4A stepper controller board. The motor and the arm is connected using a bicycle chain (roller chain) and sprockets. The door is opened and closed using a 0.5 Nm stepper motor with a 2A stepper controller (A4988 Stepper Motor Driver Carrier from Pololu), together with a timing belt and pulleys.
The door is just an aluminium frame with roller wheels that move on an aluminium track. The timing belt is attached to the back of the door. The motor and the timing belt pulley is attached to a long piece of angled aluminium, making it easier to remove (just unscrew the two bolts holding the aluminium).
The sprocket on the arm is mounted using angled brackets, and the sprocket connected to the motor is connected using a collet (RC prop adaptor). We put a couple of rollers made out of wooden rods with a shaft through the middle underneath the chain to prevent the chain from climbing off of the sprockets.
The RFID reader was mounted underneath the door, and with the antenna on the top. The RFID reader we used was the RDM6300 125KHz module from Iteadstudio. The reader didn't have a very good reading range, so we had to put the antenna on the top of the door for it to be able to read the tags.
We mounted a keypad and a RGB LED on the front of the machine. The keypad can be used to enter the code of the plastic if the item doesn't have a working tag, or to set the boot options making it possible to test individual parts of the machine. The RGB LED indicates whether the machine is ready to accept an plastic item, or if it is busy.
We put all the wires going from the controlling circuitry to the top of the arm (RFID reader signals, stepper motor connections, etc.) through a plastic pipe to protect the wire and to keep them out of the way.
The project was used as an entry for the Smart Young Mindz high school challenge (Unfortunately we did not win).
The robot is controlled using an Arduino Uno. The arm is rotated using a 3.0 Nm stepper motor and a 4A stepper controller board. The motor and the arm is connected using a bicycle chain (roller chain) and sprockets. The door is opened and closed using a 0.5 Nm stepper motor with a 2A stepper controller (A4988 Stepper Motor Driver Carrier from Pololu), together with a timing belt and pulleys.
The door is just an aluminium frame with roller wheels that move on an aluminium track. The timing belt is attached to the back of the door. The motor and the timing belt pulley is attached to a long piece of angled aluminium, making it easier to remove (just unscrew the two bolts holding the aluminium).
The sprocket on the arm is mounted using angled brackets, and the sprocket connected to the motor is connected using a collet (RC prop adaptor). We put a couple of rollers made out of wooden rods with a shaft through the middle underneath the chain to prevent the chain from climbing off of the sprockets.
The RFID reader was mounted underneath the door, and with the antenna on the top. The RFID reader we used was the RDM6300 125KHz module from Iteadstudio. The reader didn't have a very good reading range, so we had to put the antenna on the top of the door for it to be able to read the tags.
We mounted a keypad and a RGB LED on the front of the machine. The keypad can be used to enter the code of the plastic if the item doesn't have a working tag, or to set the boot options making it possible to test individual parts of the machine. The RGB LED indicates whether the machine is ready to accept an plastic item, or if it is busy.
We put all the wires going from the controlling circuitry to the top of the arm (RFID reader signals, stepper motor connections, etc.) through a plastic pipe to protect the wire and to keep them out of the way.
The source code for the project can be found here.
Overall the machine worked quite well. We are very happy with the results, even though we didn't win the competition.
Just as a tip for anybody who wants to build any robot/machine that has to be transported, build the machine small enough to fit on a normal trailer, or make sure you have access to a larger trailer. We learned this the really hard way.
Overall the machine worked quite well. We are very happy with the results, even though we didn't win the competition.
Just as a tip for anybody who wants to build any robot/machine that has to be transported, build the machine small enough to fit on a normal trailer, or make sure you have access to a larger trailer. We learned this the really hard way.

Us building the machine (Cool goggles, huh? Safety is very important!)

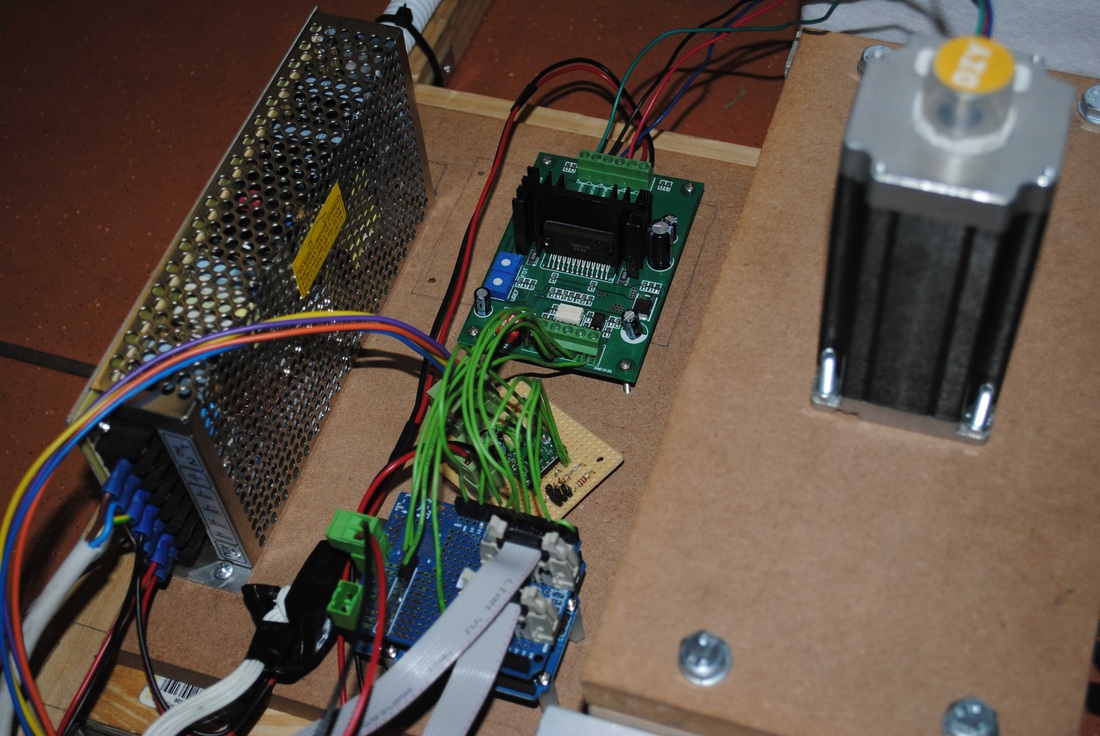
Most of the circuitry (Arduino Uno, Stepper Controllers and Power Supply)
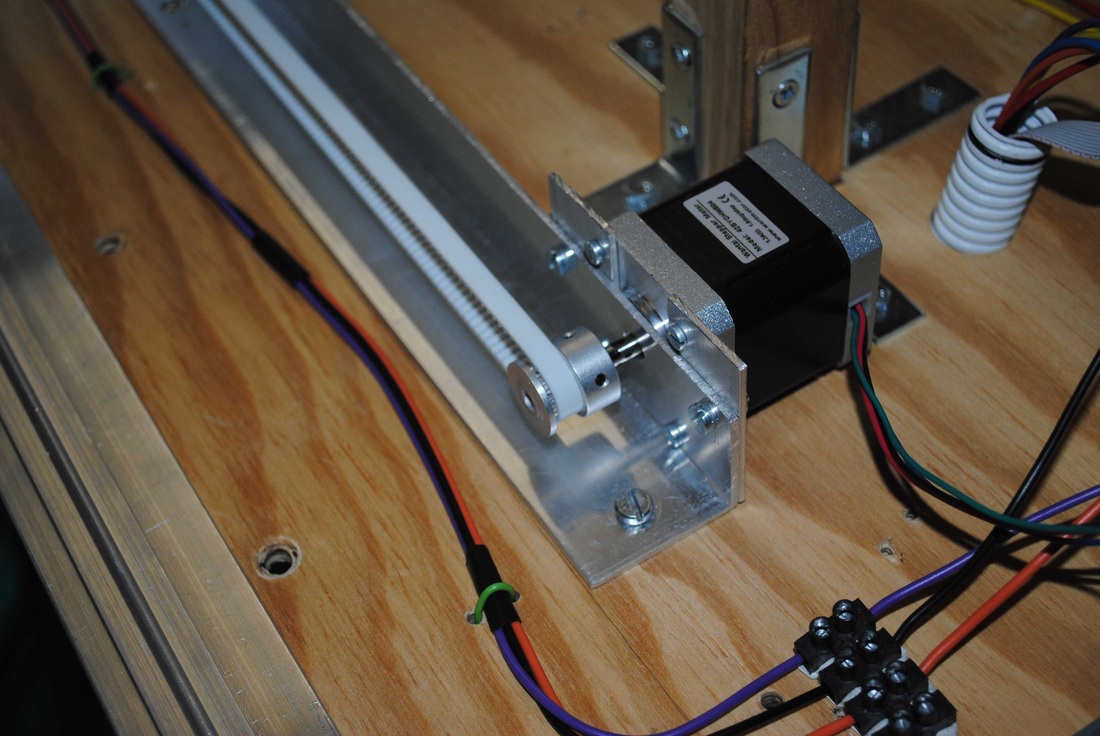
Stepper Motor used to open/close the door
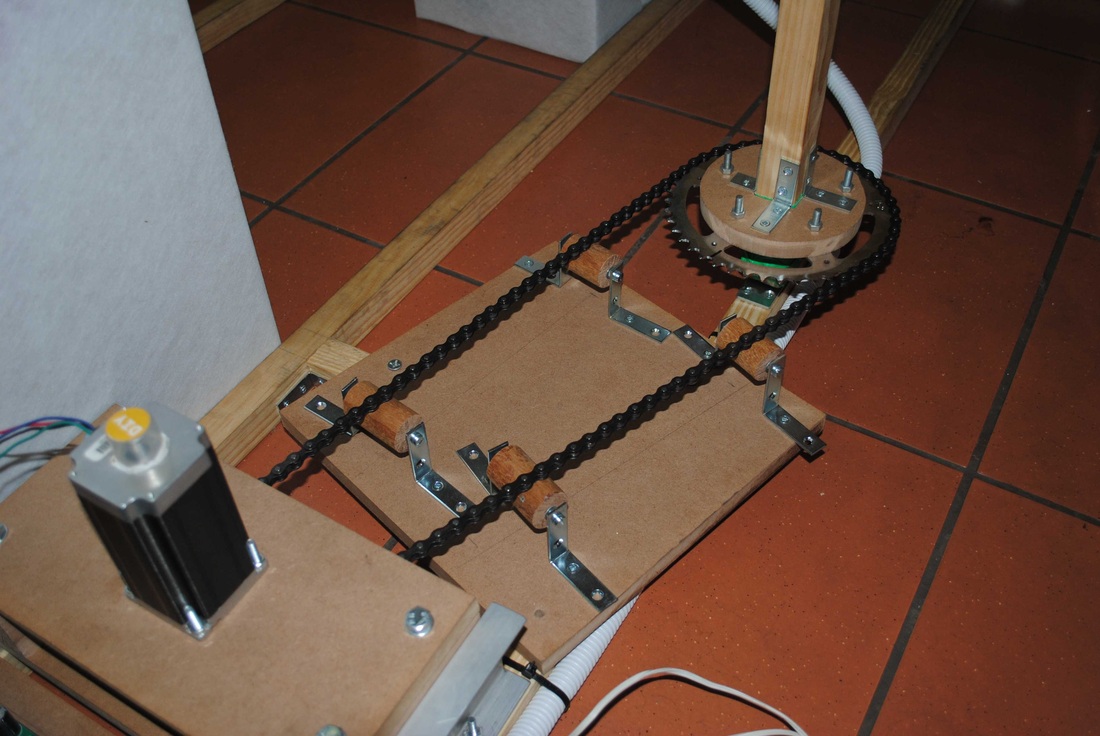
Larger Stepper Motor rotating the arm. We added the rollers to prevent the chain from climbing off of the sprockets

Keypad + RGB LED used to control settings. This was very useful for debugging purposes

Us at the final round of the competition we mentioned earlier
 RSS Feed
RSS Feed